
產品目錄
液體渦輪流量計
液體流量計
水流量計
油流量計
氣體渦輪流量計
橢圓齒輪流量計
電磁流量計
渦街流量計
蒸汽流量計
孔板流量計
旋進旋渦流量計
熱式氣體質量流量計
轉子流量計
浮子流量計
靶式流量計
氣體流量計
超聲波流量計
磁翻板液位計
浮子液位計
浮球液位計
玻璃管液位計
雷達液位計
超聲波液位計
投入式液位計
壓力變送器
差壓變送器
液位變送器
溫度變送器
熱電偶
熱電阻
雙金屬溫度計
推薦產品
聯系我們
- 金湖凱銘儀表有限公司
- 聯系電話:15195518515
- 在線客服:1464856260
- 電話:0517-86801009
- 傳真號碼:0517-86801007
- 郵箱:1464856260@qq.com
- 網址:http://www.35617.com.cn
- 地址:江蘇省金湖縣理士大道61號
關于柴油計量表的理論模型及實驗結果與分析
發布時間:2021-01-09 16:43:28??點擊次數:1842次
摘要:應用粒子成像測速技術獲得了柴油計量表葉片入口流場的速度分布信息,并基于該測量結果,運用T-G模型理論得出流量計的響應。通過與以往所采用的幾種典型的入口速度分布計算得到的結果比較分析表明,基于PIV測量的結果更接近于柴油計量表的真實響應。還比較分析了渦輪入口速度分布對柴油計量表響應的影響機理,相關結果可望為改進柴油計量表響應的計算分析方法以及優化設計提供有價值的參考。
1引言
柴油計量表作為一種速度式儀表,因其具有諸多優點被廣泛應用到工業生產以及實際生活中。在柴油計量表的實際使用中,一般需要結合流量計本身的響應曲線來計算被測管流的實際流量。獲得柴油計量表響應曲線的方法主要有2種,一是通過標準流量平臺標定,二是通過理論模型計算獲得其響應。其中標定方法在實際生產中應用更廣泛,不過特定的標定曲線往往僅適用于某些單一工況下的響應,局限性較大。因此通過對柴油計量表理論模型的探索和改進從而更準確地預測流量計的響應曲線具有重要意義。
1970年,Thompson和Grey基于葉柵理論和不可壓縮勢流提出了較為系統的計算柴油計量表響應的理論模型(以下簡稱TG模型)。該模型可以將速度入口信息以及柴油計量表各部件的幾何和運動參數均納入考慮,因而被此后的研究廣泛采用。流量測量設備的內流場對其響應有著重要影響,目前部分研究采用數值模擬手段對其進行計算進而分析儀表的響應情況。對于渦輪內流場的實際流動情況Xu采用了激光多普勒(LDA)技術對口徑100mm的柴油計量表輪轂與管壁間的12個不同位置的速度進行了測量并代入理論模型進行計算,理論計算結果與實驗結果比較吻合。
以上研究都表明,獲得準確的柴油計量表入口速度分布,結合TG模型可大大提高計算的準確性。由于實際渦輪上游情況比較復雜,不同的導流葉片、輪轂前緣設計等因素都對入口速度分布有著重要的影響,因而實際的渦輪入口速度分布,并非均勻分布或充分發展的環空分布,難以通過簡單的黏性流理論獲得通用的速度分布計算方法。因而采用實驗的手段,獲得能夠反映切合實際的渦輪入口速度分布具有重要的應用價值。縱觀以往的研究,對于入口速度分布的獲得,多是采用理論計算或是數值模擬的方法,僅有Xu采用了LDA技術觀察了渦輪環空的速度分布。LDA技術雖然計量精確,但其多光束匯聚和單點測量的性質決定了它測點較少,難以同時獲得全流場信息的缺陷,因而其僅能用于口徑較大的柴油計量表流場測量。隨著粒子圖像測速(PIV)技術的發展,其瞬時獲得全場信息的能力也被應用到流量測量的研究中,也可以用于柴油計量表葉輪輪轂與管壁的研究中。基于以上考慮,本文應用粒子成像測速技術(PIV)來獲得流場的流速信息,以便通過更準確和全面的入口速度分布進而對流量計的響應獲得認識上的深入。
2柴油計量表理論模型
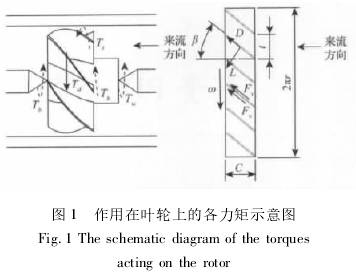
在柴油計量表處于穩定響應的狀態下,角加速度為零,此時作用在葉輪上的各力矩(見圖1)需滿足力矩平衡方程:
Td-Th-Tt-Tw-Tb-Tm=0(1)
式中:Td為葉片驅動力矩;Th為輪轂周邊黏性阻力矩;Tt為葉片頂隙黏性阻力矩;Tw為輪轂端面黏性阻力矩;Tb為軸承黏性阻力矩;Tm為軸與軸尖機械阻力矩
渦輪轉速ω為所求的量。獲得各不同力矩,通過求解力矩平衡方程可得對應工況的渦輪轉速ω。
下面分別對各力矩計算方法進行介紹。
2.1葉片驅動力矩
本文采用的理論模型葉片驅動力矩類似Xu文章中的處理方法,模型假設在葉輪輪轂和管道內壁之間的環空空間內不存在沿半徑方向的流動,因而可以將三維的渦輪葉片離散成有限個二維葉柵計算不同葉柵上葉片的受力。針對半徑為r處的葉柵,可計算其所受的驅動力系數Cdr(見圖1):
Cdr=Clcosβ-Cdsinβ(2)
式中:Cl和Cd為葉柵的升力系數和阻力系數,二者可通過不可壓縮勢流的方法計算,與葉片翼型、葉輪轉速、來流速度和半徑位置等參數相關。
通過對輪轂半徑Rh到葉頂半徑Rt的驅動力矩進行積分可以獲得作用在整個葉片上的驅動力矩Tdr(不含黏性影響):

式中:ρ為流體密度;N為葉片數量;C為葉片弦長;Ur(r)為葉柵處速度,與葉柵位置相關,在本文中通過PIV測量結果插值獲得。
實際流動中受黏性影響,流體還會在葉柵表面產生黏性力,采用黏性流體力學中二維渠道流平板黏性力的計算方法計算黏性阻力Fv
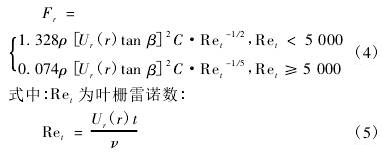
式中:t為葉柵柵距,ν為流體的運動黏性系數。
由葉柵黏性阻力Fv可求得葉片整體所受黏性阻力矩Tv:
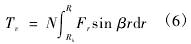
進而可以獲得葉片上所受的整體驅動力矩Td:
Td=Tdr-Tv(7)
2.2輪轂周面黏性阻力矩
本文理論模型中輪轂周面黏性阻力矩由2部分構成:葉片部分輪轂和葉片上游輪轂。
依據Tsukamoto的計算,葉片部分輪轂黏性阻力矩Thb的計算式為:
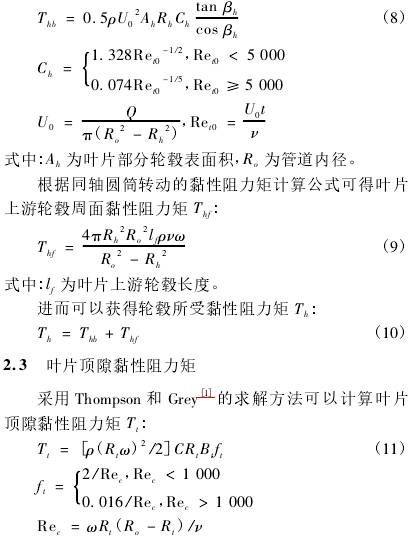
式中:Bt為葉片厚度。
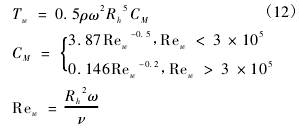
2.4輪轂端面黏性阻力矩
依據Tsukamoto的計算,輪轂端面黏性阻力矩Tw的計算式為:
2.5軸承黏性阻力矩和機械摩擦阻力矩
根據同軸圓筒黏性阻力矩計算方法可得軸承黏性阻力矩Tb
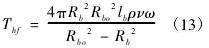
式中:Rb和Rbo分別為軸和軸承半徑,lb為軸的等效長度。
機械摩擦阻力矩基本不受轉速影響可設置為定值,本文中渦輪機械摩擦阻力矩取為5×10-7N·m。
2.6理論模型綜合分析
當渦輪進入線性響應區間后,起主要作用的是葉片驅動力矩和葉片頂隙阻力矩之間的平衡,其他各阻力矩相對較小。葉片頂隙阻力矩與渦輪軌速矩近似成正比關系,驅動力矩則主要受入口速度分布Ur(r)影響,獲得準確的入口速度分布可以使理論模型的計算結果與實際更為符合,傳統的理論模型中入口速度分布多采用均勻分布假設(即各不同半徑入口速度相等)或充分發展的環空空間速度分布,本文則通過PIV技術測量了實驗使用渦輪的入口速度分布并代入理論模型進行計算。
3實驗系統
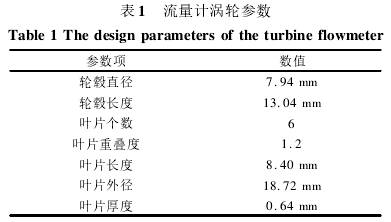
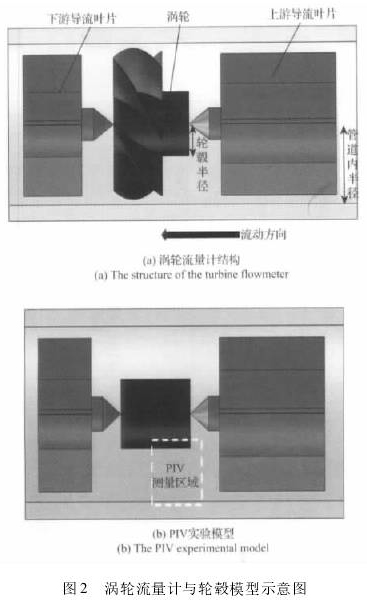
實驗在中國科大水平循環水實驗平臺上進行,實驗采用20mm口徑的柴油計量表,量程范圍是1~80方/天,其中較好線性段范圍是5~50方/天,流量計渦輪為等重疊度渦輪(不同半徑位置葉柵重疊度相同),具體參數如表1所示,這種流量計在大慶油田的生產測井中廣泛應用,其結構如圖2(a)所示。來流經過一段導流葉片整流后進入渦輪的環空空間,驅動葉輪轉動,輸出響應信號。在柴油計量表的線性響應區間中,處于穩定轉動時渦輪葉片對流體的干擾較少,相對來流攻角較小,對流體的軸向速度分布基本沒有影響,僅會稍稍增加其周向轉速。因而為了測量柴油計量表入口速度分布,特別制作了各參數與實際渦輪相同但并無葉片的透明外殼輪轂模型,如圖2(b)所示,通過PIV手段,對管道中軸面上輪轂和管壁之間的區域的軸向速度分布進行剖面測量。輪轂模型安裝在待測柴油計量表的上游,相距超過2m以保證二者之間無相互干擾。實驗流速范圍在5~25方/天,在管路下游采用時間-質量法獲得真實流速,通過光學觀測獲得柴油計量表葉輪的真實轉動頻率,同時采用PIV技術測量輪轂模型中的速度分布。
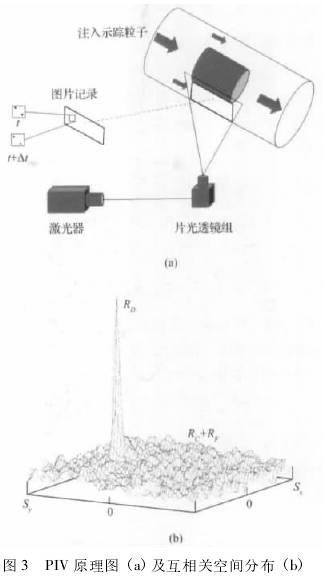
本文實驗中所使用的PIV系統為作者單位自行研制的PIV系統(見圖3(a)),激光器發出的激光依次通過凸透鏡聚焦,經柱面鏡發散成片光,再通過平面反射鏡反射成豎直片光,進入實驗觀察區。示蹤粒子跟隨流體流過實驗段,由高速攝影記錄實驗過程,通過相關計算處理得到速度分布結果。其中所用的激光器為可連續發射532mm激光(綠光),發射*大輸出功率為2W的半導體激光器。實驗采用的相機為每秒可拍攝5000幅的高速攝影。示蹤粒子采用的是空心玻璃微球,粒徑為20~40μm,密度1.05g/cm3。圖像的互相關處理程序由作者所在單位自行在MATLAB軟件平臺中編寫成。
本文進行圖像采集的方法均為多幀單曝光,即相繼2次曝光的粒子圖像分別記錄在相繼的2幅照片上,因此采取互相關算法進行圖像處理。基本原理是用相繼2幀粒子圖像I1(x珋),I2(x珋)進行相關計算:

Rc(sˉ)的理想空間分布如圖3(b)所示,僅有一個明顯的級大峰值,其中珋s為判讀小區內粒子的平均位移矢量。本文算法采用16×16的矩形像素作為判讀小區,對應的空間分辨率為0.35mm×0.35mm,時間分辨率達0.2ms。整個圖像在輪轂與管壁之間的速度剖面可取的32個流速點,從而可以較準確地得到其間的速度分布情況。
4實驗結果與分析
通過對PIV實驗中所拍攝的照片(見圖4(a))進行后處理,可以得到各個流量點下輪轂與管壁之間軸截面流場軸向速度分布信息如圖4(b)所示。鑒于試驗模型的軸對稱性,從原理上說該軸截面的速度分布可以推廣到周向環形區域。
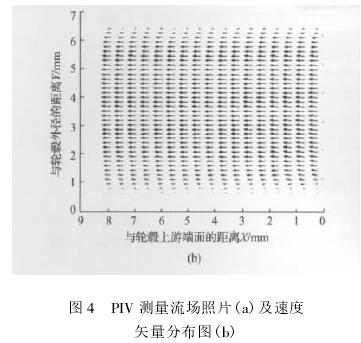
實驗中流量計的渦輪輪轂半徑為4mm,而管道內徑為10mm,因而速度分布都在這6mm的區間內。通過圖像處理可以獲得32個不同位置的速度,在此基礎上進行插值即可獲得整個環空流場的軸向速度分布。圖5(a)反映了實驗所測得的幾個不同工況點的軸向速度分布,從圖中可以看出,流速在中間位置較高,由于邊界層的影響,在靠近輪轂和管壁附近流速逐漸趨近于零。隨著流速的升高,整體速度分布向管壁方向偏移,速度*大值位置半徑增大,輪轂表面邊界層厚度增加,管壁表面邊界層厚度減少。與Xu采用LDA測量的結果相比,本文結果在半徑較大處速度較高,二者的不同結果也反映了不同設計的柴油計量表入口速度分布存在差異。相比LDA而言,PIV可以更加全面地獲得輪轂與管壁之間的流速分布信息。

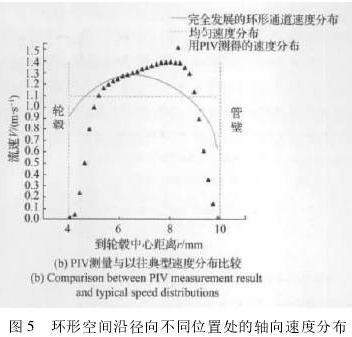
將實驗中PIV測得的速度分布與同流量下的完全發展的環形通道速度分布以及此流量下的均勻分布進行對比,如圖5(b)所示,從中可以看出,用PIV測得的速度分布與完全發展的環形通道速度分布有明顯不同。其中前者的峰值比較靠近管道內壁方向,而后者的峰值較靠近輪轂方向。另外,完全發展的環形通道速度分布比用PIV測得的速度分布更加平緩。由于不同位置的流體對渦輪葉片作用效果不同,實際流速中峰值在不同位置對渦輪產生的驅動效果可能會有很大差異,如圖5(b)中所示的完全發展速度分布和均勻速度分布都很平緩,不能完全反映實際流動中不同位置的流場信息,計算的結果中自然也就將這些差異對渦輪響應可能產生的特殊貢獻有所體現。
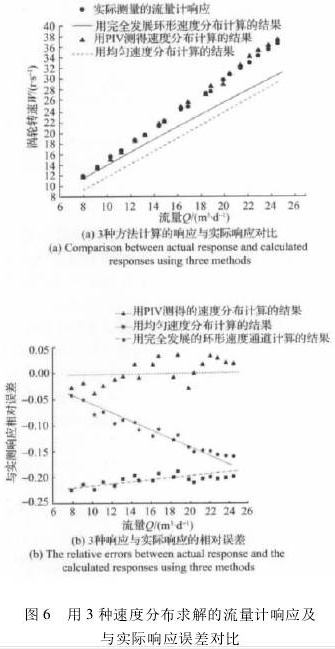
分別用3種速度分布作為渦輪入口速度分布求解流量計響應,與實際測得的響應進行對比,如圖6(a)所示。從圖中可以看出,采用完全發展的環形速度分布和均勻速度分布計算的渦輪響應值明顯低于柴油計量表的真實響應。在渦輪正常響應時,在葉片中上部(即靠近管壁部分)的流體驅動渦輪轉動,而在葉片底部(即靠近輪轂部分)的流體阻礙渦輪轉動,因而流體分布越靠近管壁,帶來的驅動力矩越大,使得葉輪的轉速越快。從圖5(b)中來看,真實速度分布更靠進管壁,應為理論求解結果轉速偏低的原因。
分別計算各個響應在不同流量點處與真實響應的相對誤差,結果如圖6(b)所示。從圖中可以明顯看出,用PIV獲得的速度分布計算的結果與實際響應的相對誤差*小,在3%以內;用均勻入口速度分布計算的結果誤差*大;用完全發展的環形通道速度分布當雷諾數超過2000時,由于計算模型假設由層流的速度分布直接轉變為湍流的速度分布模型,未能合理地反映實際流動中逐步轉變的過渡階段,導致理論結果與實際速度分布有較大差異,所以誤差較大。通過這些對比不難看出,獲得真實的速度分布能更為準確地計算柴油計量表的實際響應。面對復雜的上游來流條件,PIV結果更能反映柴油計量表內部流動的主要特征,這也從另一個側面表明,對柴油計量表內部復雜流動的精細測量和深入認識也將是完善相關理論和進一步優化其性能的重要途徑。
5結論
本文通過PIV技術觀測了柴油計量表入口軸向速度分布并代入TG模型進行計算。結果表明,PIV技術可以作為柴油計量表的入口速度的觀測手段。PIV技術代入模型后計算所得的渦輪轉速與實際較為吻合,而采用均勻速度入口或是充分發展的環空空間速度分布均與實際存在些許差異,代入模型后所得誤差較大,也反映了不同的入口速度分布對流量計響應具有十分重要的影響。
由于柴油計量表入口速度分布受到多種因素的影響,難以完全依賴簡單的理論計算,因而PIV技術可以有的放矢地用于柴油計量表的內流場觀察,獲得真實的流速分布信息,進而改進理論模型的計算和分析,在新一代柴油計量表的研制和完善相關理論中發揮重要的作用。
1引言
柴油計量表作為一種速度式儀表,因其具有諸多優點被廣泛應用到工業生產以及實際生活中。在柴油計量表的實際使用中,一般需要結合流量計本身的響應曲線來計算被測管流的實際流量。獲得柴油計量表響應曲線的方法主要有2種,一是通過標準流量平臺標定,二是通過理論模型計算獲得其響應。其中標定方法在實際生產中應用更廣泛,不過特定的標定曲線往往僅適用于某些單一工況下的響應,局限性較大。因此通過對柴油計量表理論模型的探索和改進從而更準確地預測流量計的響應曲線具有重要意義。
1970年,Thompson和Grey基于葉柵理論和不可壓縮勢流提出了較為系統的計算柴油計量表響應的理論模型(以下簡稱TG模型)。該模型可以將速度入口信息以及柴油計量表各部件的幾何和運動參數均納入考慮,因而被此后的研究廣泛采用。流量測量設備的內流場對其響應有著重要影響,目前部分研究采用數值模擬手段對其進行計算進而分析儀表的響應情況。對于渦輪內流場的實際流動情況Xu采用了激光多普勒(LDA)技術對口徑100mm的柴油計量表輪轂與管壁間的12個不同位置的速度進行了測量并代入理論模型進行計算,理論計算結果與實驗結果比較吻合。
以上研究都表明,獲得準確的柴油計量表入口速度分布,結合TG模型可大大提高計算的準確性。由于實際渦輪上游情況比較復雜,不同的導流葉片、輪轂前緣設計等因素都對入口速度分布有著重要的影響,因而實際的渦輪入口速度分布,并非均勻分布或充分發展的環空分布,難以通過簡單的黏性流理論獲得通用的速度分布計算方法。因而采用實驗的手段,獲得能夠反映切合實際的渦輪入口速度分布具有重要的應用價值。縱觀以往的研究,對于入口速度分布的獲得,多是采用理論計算或是數值模擬的方法,僅有Xu采用了LDA技術觀察了渦輪環空的速度分布。LDA技術雖然計量精確,但其多光束匯聚和單點測量的性質決定了它測點較少,難以同時獲得全流場信息的缺陷,因而其僅能用于口徑較大的柴油計量表流場測量。隨著粒子圖像測速(PIV)技術的發展,其瞬時獲得全場信息的能力也被應用到流量測量的研究中,也可以用于柴油計量表葉輪輪轂與管壁的研究中。基于以上考慮,本文應用粒子成像測速技術(PIV)來獲得流場的流速信息,以便通過更準確和全面的入口速度分布進而對流量計的響應獲得認識上的深入。
2柴油計量表理論模型
在柴油計量表處于穩定響應的狀態下,角加速度為零,此時作用在葉輪上的各力矩(見圖1)需滿足力矩平衡方程:
Td-Th-Tt-Tw-Tb-Tm=0(1)
式中:Td為葉片驅動力矩;Th為輪轂周邊黏性阻力矩;Tt為葉片頂隙黏性阻力矩;Tw為輪轂端面黏性阻力矩;Tb為軸承黏性阻力矩;Tm為軸與軸尖機械阻力矩
渦輪轉速ω為所求的量。獲得各不同力矩,通過求解力矩平衡方程可得對應工況的渦輪轉速ω。
下面分別對各力矩計算方法進行介紹。
2.1葉片驅動力矩
本文采用的理論模型葉片驅動力矩類似Xu文章中的處理方法,模型假設在葉輪輪轂和管道內壁之間的環空空間內不存在沿半徑方向的流動,因而可以將三維的渦輪葉片離散成有限個二維葉柵計算不同葉柵上葉片的受力。針對半徑為r處的葉柵,可計算其所受的驅動力系數Cdr(見圖1):
Cdr=Clcosβ-Cdsinβ(2)
式中:Cl和Cd為葉柵的升力系數和阻力系數,二者可通過不可壓縮勢流的方法計算,與葉片翼型、葉輪轉速、來流速度和半徑位置等參數相關。
通過對輪轂半徑Rh到葉頂半徑Rt的驅動力矩進行積分可以獲得作用在整個葉片上的驅動力矩Tdr(不含黏性影響):
式中:ρ為流體密度;N為葉片數量;C為葉片弦長;Ur(r)為葉柵處速度,與葉柵位置相關,在本文中通過PIV測量結果插值獲得。
實際流動中受黏性影響,流體還會在葉柵表面產生黏性力,采用黏性流體力學中二維渠道流平板黏性力的計算方法計算黏性阻力Fv
式中:t為葉柵柵距,ν為流體的運動黏性系數。
由葉柵黏性阻力Fv可求得葉片整體所受黏性阻力矩Tv:
進而可以獲得葉片上所受的整體驅動力矩Td:
Td=Tdr-Tv(7)
2.2輪轂周面黏性阻力矩
本文理論模型中輪轂周面黏性阻力矩由2部分構成:葉片部分輪轂和葉片上游輪轂。
依據Tsukamoto的計算,葉片部分輪轂黏性阻力矩Thb的計算式為:
式中:Bt為葉片厚度。
2.4輪轂端面黏性阻力矩
依據Tsukamoto的計算,輪轂端面黏性阻力矩Tw的計算式為:
2.5軸承黏性阻力矩和機械摩擦阻力矩
根據同軸圓筒黏性阻力矩計算方法可得軸承黏性阻力矩Tb
式中:Rb和Rbo分別為軸和軸承半徑,lb為軸的等效長度。
機械摩擦阻力矩基本不受轉速影響可設置為定值,本文中渦輪機械摩擦阻力矩取為5×10-7N·m。
2.6理論模型綜合分析
當渦輪進入線性響應區間后,起主要作用的是葉片驅動力矩和葉片頂隙阻力矩之間的平衡,其他各阻力矩相對較小。葉片頂隙阻力矩與渦輪軌速矩近似成正比關系,驅動力矩則主要受入口速度分布Ur(r)影響,獲得準確的入口速度分布可以使理論模型的計算結果與實際更為符合,傳統的理論模型中入口速度分布多采用均勻分布假設(即各不同半徑入口速度相等)或充分發展的環空空間速度分布,本文則通過PIV技術測量了實驗使用渦輪的入口速度分布并代入理論模型進行計算。
3實驗系統
實驗在中國科大水平循環水實驗平臺上進行,實驗采用20mm口徑的柴油計量表,量程范圍是1~80方/天,其中較好線性段范圍是5~50方/天,流量計渦輪為等重疊度渦輪(不同半徑位置葉柵重疊度相同),具體參數如表1所示,這種流量計在大慶油田的生產測井中廣泛應用,其結構如圖2(a)所示。來流經過一段導流葉片整流后進入渦輪的環空空間,驅動葉輪轉動,輸出響應信號。在柴油計量表的線性響應區間中,處于穩定轉動時渦輪葉片對流體的干擾較少,相對來流攻角較小,對流體的軸向速度分布基本沒有影響,僅會稍稍增加其周向轉速。因而為了測量柴油計量表入口速度分布,特別制作了各參數與實際渦輪相同但并無葉片的透明外殼輪轂模型,如圖2(b)所示,通過PIV手段,對管道中軸面上輪轂和管壁之間的區域的軸向速度分布進行剖面測量。輪轂模型安裝在待測柴油計量表的上游,相距超過2m以保證二者之間無相互干擾。實驗流速范圍在5~25方/天,在管路下游采用時間-質量法獲得真實流速,通過光學觀測獲得柴油計量表葉輪的真實轉動頻率,同時采用PIV技術測量輪轂模型中的速度分布。
本文實驗中所使用的PIV系統為作者單位自行研制的PIV系統(見圖3(a)),激光器發出的激光依次通過凸透鏡聚焦,經柱面鏡發散成片光,再通過平面反射鏡反射成豎直片光,進入實驗觀察區。示蹤粒子跟隨流體流過實驗段,由高速攝影記錄實驗過程,通過相關計算處理得到速度分布結果。其中所用的激光器為可連續發射532mm激光(綠光),發射*大輸出功率為2W的半導體激光器。實驗采用的相機為每秒可拍攝5000幅的高速攝影。示蹤粒子采用的是空心玻璃微球,粒徑為20~40μm,密度1.05g/cm3。圖像的互相關處理程序由作者所在單位自行在MATLAB軟件平臺中編寫成。
本文進行圖像采集的方法均為多幀單曝光,即相繼2次曝光的粒子圖像分別記錄在相繼的2幅照片上,因此采取互相關算法進行圖像處理。基本原理是用相繼2幀粒子圖像I1(x珋),I2(x珋)進行相關計算:
Rc(sˉ)的理想空間分布如圖3(b)所示,僅有一個明顯的級大峰值,其中珋s為判讀小區內粒子的平均位移矢量。本文算法采用16×16的矩形像素作為判讀小區,對應的空間分辨率為0.35mm×0.35mm,時間分辨率達0.2ms。整個圖像在輪轂與管壁之間的速度剖面可取的32個流速點,從而可以較準確地得到其間的速度分布情況。
4實驗結果與分析
通過對PIV實驗中所拍攝的照片(見圖4(a))進行后處理,可以得到各個流量點下輪轂與管壁之間軸截面流場軸向速度分布信息如圖4(b)所示。鑒于試驗模型的軸對稱性,從原理上說該軸截面的速度分布可以推廣到周向環形區域。
實驗中流量計的渦輪輪轂半徑為4mm,而管道內徑為10mm,因而速度分布都在這6mm的區間內。通過圖像處理可以獲得32個不同位置的速度,在此基礎上進行插值即可獲得整個環空流場的軸向速度分布。圖5(a)反映了實驗所測得的幾個不同工況點的軸向速度分布,從圖中可以看出,流速在中間位置較高,由于邊界層的影響,在靠近輪轂和管壁附近流速逐漸趨近于零。隨著流速的升高,整體速度分布向管壁方向偏移,速度*大值位置半徑增大,輪轂表面邊界層厚度增加,管壁表面邊界層厚度減少。與Xu采用LDA測量的結果相比,本文結果在半徑較大處速度較高,二者的不同結果也反映了不同設計的柴油計量表入口速度分布存在差異。相比LDA而言,PIV可以更加全面地獲得輪轂與管壁之間的流速分布信息。
將實驗中PIV測得的速度分布與同流量下的完全發展的環形通道速度分布以及此流量下的均勻分布進行對比,如圖5(b)所示,從中可以看出,用PIV測得的速度分布與完全發展的環形通道速度分布有明顯不同。其中前者的峰值比較靠近管道內壁方向,而后者的峰值較靠近輪轂方向。另外,完全發展的環形通道速度分布比用PIV測得的速度分布更加平緩。由于不同位置的流體對渦輪葉片作用效果不同,實際流速中峰值在不同位置對渦輪產生的驅動效果可能會有很大差異,如圖5(b)中所示的完全發展速度分布和均勻速度分布都很平緩,不能完全反映實際流動中不同位置的流場信息,計算的結果中自然也就將這些差異對渦輪響應可能產生的特殊貢獻有所體現。
分別用3種速度分布作為渦輪入口速度分布求解流量計響應,與實際測得的響應進行對比,如圖6(a)所示。從圖中可以看出,采用完全發展的環形速度分布和均勻速度分布計算的渦輪響應值明顯低于柴油計量表的真實響應。在渦輪正常響應時,在葉片中上部(即靠近管壁部分)的流體驅動渦輪轉動,而在葉片底部(即靠近輪轂部分)的流體阻礙渦輪轉動,因而流體分布越靠近管壁,帶來的驅動力矩越大,使得葉輪的轉速越快。從圖5(b)中來看,真實速度分布更靠進管壁,應為理論求解結果轉速偏低的原因。
分別計算各個響應在不同流量點處與真實響應的相對誤差,結果如圖6(b)所示。從圖中可以明顯看出,用PIV獲得的速度分布計算的結果與實際響應的相對誤差*小,在3%以內;用均勻入口速度分布計算的結果誤差*大;用完全發展的環形通道速度分布當雷諾數超過2000時,由于計算模型假設由層流的速度分布直接轉變為湍流的速度分布模型,未能合理地反映實際流動中逐步轉變的過渡階段,導致理論結果與實際速度分布有較大差異,所以誤差較大。通過這些對比不難看出,獲得真實的速度分布能更為準確地計算柴油計量表的實際響應。面對復雜的上游來流條件,PIV結果更能反映柴油計量表內部流動的主要特征,這也從另一個側面表明,對柴油計量表內部復雜流動的精細測量和深入認識也將是完善相關理論和進一步優化其性能的重要途徑。
5結論
本文通過PIV技術觀測了柴油計量表入口軸向速度分布并代入TG模型進行計算。結果表明,PIV技術可以作為柴油計量表的入口速度的觀測手段。PIV技術代入模型后計算所得的渦輪轉速與實際較為吻合,而采用均勻速度入口或是充分發展的環空空間速度分布均與實際存在些許差異,代入模型后所得誤差較大,也反映了不同的入口速度分布對流量計響應具有十分重要的影響。
由于柴油計量表入口速度分布受到多種因素的影響,難以完全依賴簡單的理論計算,因而PIV技術可以有的放矢地用于柴油計量表的內流場觀察,獲得真實的流速分布信息,進而改進理論模型的計算和分析,在新一代柴油計量表的研制和完善相關理論中發揮重要的作用。
